2024年12月3日,北京大学电子学院前沿论坛第79期成功举办。论坛特邀加拿大皇家科学院院士、加拿大工程院院士、加拿大工程研究院院士、IEEE会士、IEEE车载技术学会主席、加拿大滑铁卢大学教授庄卫华担任主讲嘉宾。庄院士以“网联自动驾驶车辆的协作感知与计算”为主题,带来了一场内容详实、视野开阔的学术报告。本次报告由电子学院张嘉楠助理教授主持,60余名校内外师生参会。

电子学院党委副书记程翔教授在致辞中热烈欢迎庄院士的到来,并高度评价了她在学术研究和工程应用领域的卓越贡献。程翔指出,庄院士不仅在理论研究中取得了多项突破性成果,还在技术转化方面推动了学术成果的落地,助力相关领域的实际发展。与此同时,程翔特别提到,庄院士在教书育人方面也树立了典范,不仅在学术上引领潮头,更以严谨治学和悉心指导培养了大批优秀人才,真正做到了桃李满天下。程翔衷心祝愿与会师生通过此次报告拓展视野、启迪思维,享受这场思想与智慧碰撞的学术盛宴。

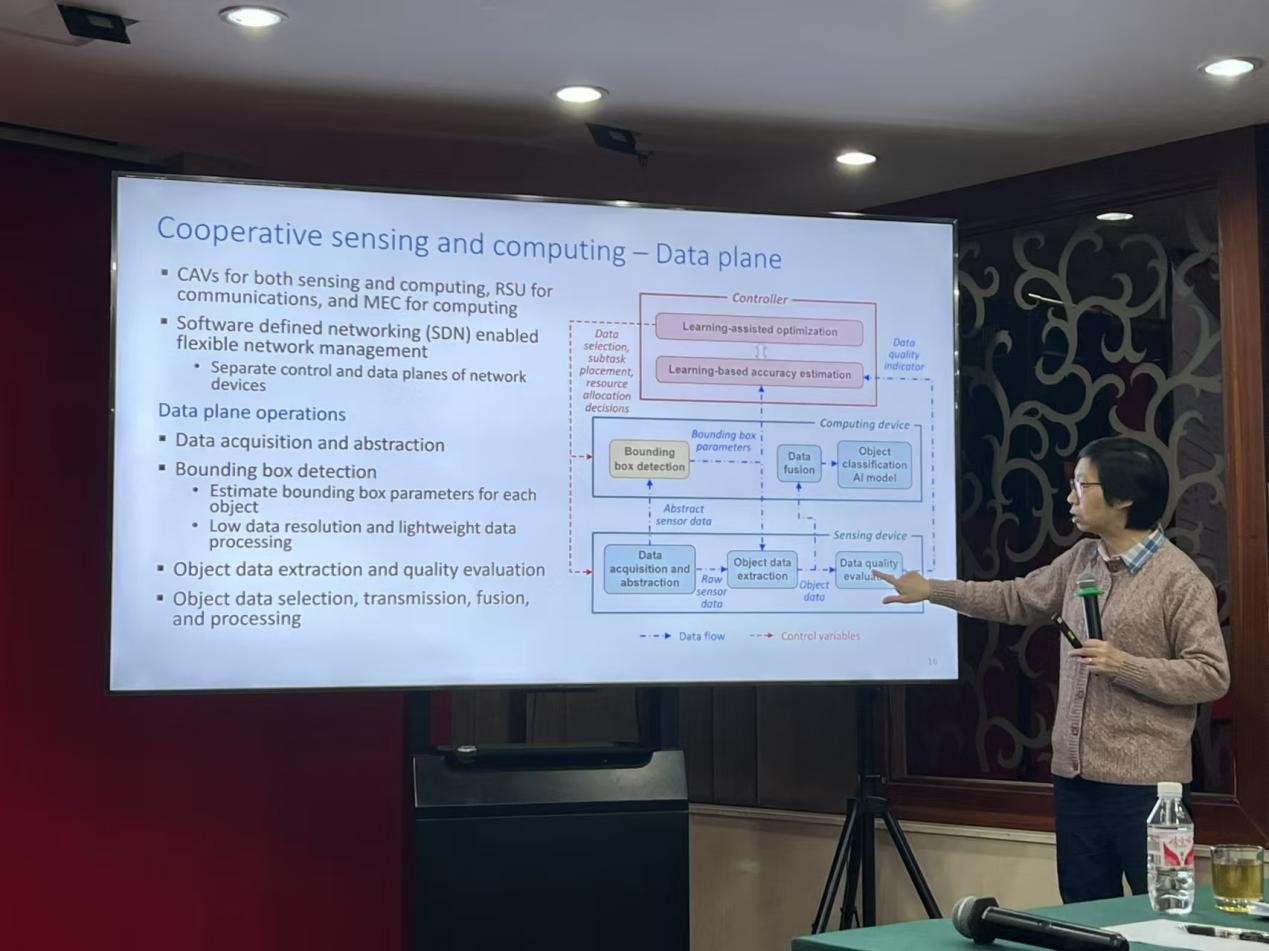
报告中,庄院士围绕网联自动驾驶车辆(CAV)领域的技术挑战、协作模型及数据选择与网络资源分配方案进行了深入阐述。她指出,随着5G/6G时代的到来,人工智能将在物联网和智能网联系统等领域发挥关键作用,而自动驾驶正是其中的重要应用场景之一。可通过人工智能驱动的协作感知技术实现CAV高效协作与精准感知。
针对系统可扩展性、性能不确定性和环境动态性三大核心挑战,庄院士团队提出了一种创新的协作感知与计算方案。在感知数据选择方面,研究了一种基于深度神经网络(DNN)的学习模型,通过评估物体分类的准确性与传感数据质量之间的关联,优化多车感知数据的选择策略。在网络资源分配上,采用软件定义网络技术,通过控制层输出边缘计算决策,合理分配计算任务与通信资源,提升CAV与路侧单元之间的感知精度和资源利用效率。此外,在满足延迟和准确性要求的前提下,实现资源分配与任务部署的最优平衡。通过构建并迭代求解相关优化问题,有效降低了资源消耗。仿真结果显示,该方案显著提升了感知精度,同时降低了资源开销,为协作感知与计算领域提供了新的技术思路。
在互动交流环节,庄院士与现场师生就基于模型的交替优化训练、任务导向的模型通用性与专用性平衡、人工智能方法与数学优化建模结合等热点问题进行了深入讨论。她分享了诸多富有启发性的研究见解,鼓励师生从多角度探索相关领域的技术创新。



报告结束后,电子学院党委书记冯梅萍教授与党委副书记程翔教授共同为庄卫华院士颁发了“北京大学电子学院前沿论坛”纪念牌,并合影留念。

此次论坛开拓了师生的学术视野,深化了对网联自动驾驶前沿研究的理解,为未来的研究合作奠定了坚实基础。
