对环境刺激的感知是人体的重要功能之一。皮肤作为人体最大的感受器官,广泛分布着各类机械感受器,将机械刺激转化为电信号,实现对触觉、压力、滑动、扭转、振动等机械刺激的感知,帮助人与物理世界进行信息交互。电子皮肤是一种新型的人机交互界面,它模拟人类皮肤的感知特性,在智能机器人、健康监测、仿生假肢以及可穿戴电子设备等领域有广阔的应用前景。对多种机械刺激的时空识别对于电子皮肤(e-skin)至关重要,电子皮肤能提供更完整和准确的交互信息,以实现精细功能,如手势识别、对象操纵和精细触觉识别。然而,非特定传感器响应和集成后传感器性能衰退限制了当前系统的感知能力。尽管随着材料科学的进步与新型结构的涌现,电子皮肤得到了迅速的发展,目前,电子皮肤能对单一类型的机械刺激进行高灵敏的识别。但是识别不同类型、大小和方向的机械刺激仍然面临挑战。
电子学院长聘副教授胡又凡课题组和北京大学工学院韦小丁特聘研究员课题组针对新型用于多种机械刺激识别的电子皮肤展开合作研究,近期取得重要进展。他们提出了一种新型仿生三维结构,实现压力、剪切力和应变及其方向的高灵敏识别和区分。
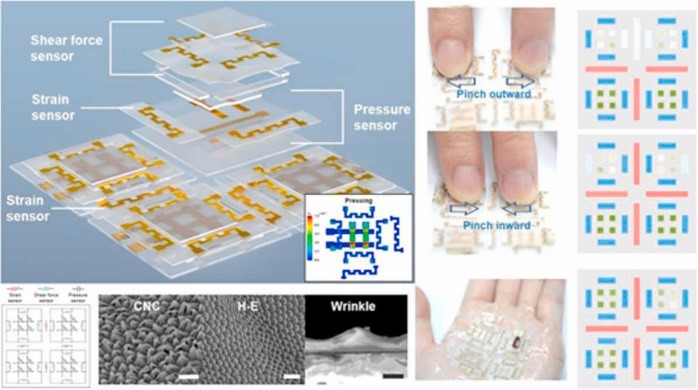
课题组提出了一种新型的三维结构,其模拟人类皮肤中机械刺激小体的空间排布;基于此结构,设计并制备了一种具有对多种刺激感知功能的电子皮肤,它集成了多种传感器,其中,压力传感器、剪切力传感器和拉伸传感器以分层、非重叠和悬空的方式分布,使传感器间形成机械隔离,每类传感器仅对特定的机械刺激响应,不受其他刺激干扰。所提出的多模式感知电子皮肤无需复杂的解耦过程就能区分压力、两个方向的应变以及四个方向的剪切力,这有利于传感系统的识别速度及功耗。在电子皮肤中在不同的传感器分别设计了倒伏纳米圆锥微结构、半椭球和波浪状的新型微结构,使传感器具有优异的性能,其中应变传感器的灵敏度为6,应变的线性工作范围为80%(线性>0.99);剪切力的灵敏度为0.1 N-1;压力的灵敏度为3.78 kPa-1;所有这些传感器响应速度快,响应时间大约为100毫秒。这些传感器的优异性能使电子皮肤能实现对多种机械刺激的实时记录和空间映射。测试结果表明,该电子皮肤能通过对多种机械刺激进行空间映射来实现多点触摸手势识别和轻微物体(手上0.065g红豆)的空间定位,以说明其在可穿戴设备、机器人和仿生假肢中的潜在应用。
2021年11月,该工作以《用于多机械刺激识别的仿生三维集成电子皮肤》(A bioinspired three-dimensional integrated e-skin for multiple mechanical stimuli recognition)为题,发表在纳米材料学领域重要期刊《纳米能源》(Nano Energy, 2022, 92, 106777);信息科学技术学院博士研究生曾祥雯和工学院博士研究生刘凤鸣为共同第一作者,胡又凡和韦小丁为通讯作者。
相关工作得到国家自然科学基金、国家重点基础研究发展计划等支持。
原文链接:https://www.sciencedirect.com/science/article/pii/S2211285521010260
